
Nama : Ami Komariyatul Kibtiyah
Dosen : Dr.Djadja Achmad Sardjana ST,MM
A.
KOMPONEN SISTEM CERDAS
1. Basis Pengetahuan
Basis Pengetahuan berisi pengetahuan yang dibutuhkan untuk
memahami, memformulasi, dan memecahkan masalah. Basis pengetahuan tersusun atas
2 elemen dasar yaitu : a.Fakta, misalnya: situasi, kondisi, dan kenyataan dari
permasalahan yang ada, serta teori dalam bidang itu. b.Aturan, yang mengarahkan
penggunaan pengetahuan untuk memecahkan masalah yang spesifik dalam bidang yang
khusus 2. Mesin Inferensi
Mesin Inferensi (Inference Engine), merupakan otak dari Kecerdasan buatan. Juga dikenal sebagai penerjemah aturan (rule interpreter). Komponen ini berupa program komputer yang menyediakan suatu metodologi untuk memikirkan (reasoning) dan memformulasi kesimpulan. Kerja mesin inferensi meliputi :
a.Menentukan aturan mana yang akan
dipakai
b.Menyajikan pertanyaan kepada
pemakai ketika diperlukan.
c.Menambahkan jawaban ke dalam
memori kecerdasan buatan dan sistem pakar.
d.Menyimpulkan fakta baru dari
sebuah aturan
e.Menambahkan fakta tadi (yang telah
diperoleh) ke dalam memori
3.Interface Kecerdasan Buatan dan Sistem Pakar mengatur komunikasi antara pengguna dan komputer. Komunikasi
ini paling baik berupa bahasa alami, biasanya disajikan dalam bentuk
tanya-jawab dan kadang ditampilkan dalam bentuk gambar/grafik. Antarmuka yang
lebih canggih dilengkapi dengan percakapan (voice communication).
B. KONSEP TURING KAITANNYA DENGAN SISTEM CERDAS
Uji Turing
adalah ujian yang menentukan apakah suatu mesin mampu
menunjukkan perilaku cerdas yang mirip dengan atau tak dapat dibedakan dari
manusia.
Konsep
|
||
1.
|
Turing Test – Metode Pengujian Kecerdasan
|
|
|
||
Turing mengatakan bahwa di
masa depan komputer
dapat di program
untuk mendapat kemampuan
yang dapat menyaingi manusia. Sebagai
bagian dari argumennya,
Turing mengajukan ide
tentang sebuah permainan meniru, dimana seorang manusia dan
sebuah computer akan di”interogasi” di bawah kondisi dimana si penginterogasi tidak
tahu yang mana manusia
dan yang mana komputer. Penginterogasian dilakukan murni
dengan pesan teks.
Turing mengatakan apabila
si penginterogasi tidak
dapat membedakan mereka dengan bertanya, maka kita tidak bisa tidak
mengatakan bahwa komputer itu pintar. Permainan meniru inilah yang biasa
disebut Turing test untuk kecerdasan.

Turing test
Bayangkan
setting berikut : ada dua buah ruangan, A dan B.Salah satu ruang berisi
komputer, yang lain berisi manusia. Si
penginterogasi berada di luar dan tidak
tahu ruangan mana yang berisi manusia
dan yang mana
yang berisi komputer.
Dia dapat mengajukan pertanyaan
melalui sebuah teletype dan akan
menerima jawaban dari A dan B. si Penanya ini kemudian harus mengidentifikasi
apakah A atau B yang adalah manusia.
Untuk melewati Turing Test
komputer harus bisa menipu si penanya sehingga ia percaya bahwa komputer itu
adalah manusia.
Sumber :
C. PENGERTIAN
DAN JENIS-JENIS METODE PENCARIAN DALAM SISTEM CERDAS

Metode Pencarian dan Pelacakan
• Hal penting dalam menentukan keberhasilan
sistem cerdas adalah kesuksesan dalam pencarian.
• Pencarian = suatu proses mencari solusi dari suatu
permasalahan melalui sekumpulan kemungkinan ruang keadaan (state space).
• Ruang keadaan = merupakan suatu ruang yang berisi semua keadaan
yang mungkin.
• Untuk mengukur perfomansi metode
pencarian, terdapat 4 kriteria yang dapat digunakan :
1. Completeness : apakah metode tersebut menjamin penemuan solusi
jika solusinya memang ada?
2. Time complexity : berapa lama waktu yang diperlukan? [semakin
cepat, semakin baik]
3. Space complexity : berapa banyak memori yang diperlukan
4. Optimality : apakah metode tersebut menjamin menemukan
solusi yang terbaik jika terdapat beberapa solusi berbeda?
• Dua teknik pencarian dan
pelacakan
1. Pencarian buta (blind search)
a. Pencarian melebar pertama (Breadth – First Search)
b. Pencarian mendalam pertama (Depth – First Search)
2. Pencarian terbimbing (heuristic search)
a. Pendakian Bukit (Hill Climbing)
b. Pencarian Terbaik Pertama (Best First Search)
1.
Pencarian Buta (Blind Search)
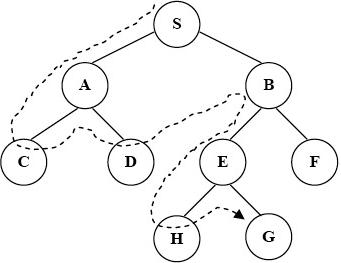
a.Pencarian Melebar Pertama (Breadth-First
Search)
• Semua node pada level n akan dikunjungi
terlebih dahulu sebelum level n+1
• Mulai dari akar terus ke level 1 dari kiri
ke kanan
• Kemudian ke level selanjutnya hingga
solusi ditemukan

• Keuntungan
– Tidak akan menemui jalan buntu
– Menjamin ditemukannya solusi (jika solusinya memang ada) dan solusi yang
ditemukan pasti
yang paling baik
– Jika ada satu solusi maka bread-first search akan menemukannya
• Kelemahannya
– Membutuhkan memori yang cukup banyak
– Membutuhkan waktu yang cukup lama
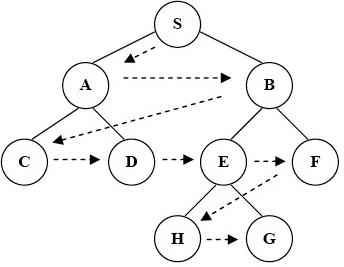
b.Pencarian mendalam pertama (Depth-First
Search)
• Proses pencarian dilakukan pada semua
anaknya sebelum dilakukan pencarian ke node-node yang selevel
• Keuntungan
– Memori yang relatif kecil
– Secara kebetulan, akan menemukan solusi tanpa harus menguji lebih banyak
lagi

Pencarian Heuristik
• Pencarian buta tidak selalu dapat
diterapkan dengan baik
– Waktu aksesnya yang cukup lama
– Besarnya memori yang diperlukan
• Metode heuristic search diharapkan bisa
menyelesaikan permasalahan yang lebih besar.
• Metode heuristic search menggunakan suatu
fungsi yang menghitung biaya perkiraan (estimasi) dari suatu simpul tertentu
menuju ke simpul tujuan disebut fungsi heuristic
• Aplikasi yang menggunakan fungsi heuristic
: Google, Deep Blue Chess Machine
• Contoh pada masalah 8 puzzle
keadaan
awal

Tujuan
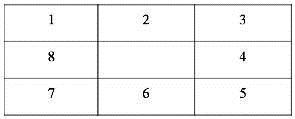
Keadaan Awal Tujuan Pencarian Heuristik
• Operator
– Ubin kosong geser ke kanan
– Ubin kosong geser ke kiri
– Ubin kosong geser ke atas
– Ubin kosong geser ke bawah
• Langkah Awal
Gambar
• Langkah Awal hanya 3 operator yang bisa
digunakan
– Ubin kosong digeser ke kiri,
ke kanan dan ke atas.
• Jika menggunakan pencarian buta, tidak
perlu mengetahui operasi apa yang akan dikerjakan (sembarang)
• Pada pencarian heuristik perlu diberikan
informasi khusus dalam domain tersebut
• Untuk jumlah ubin yang menempati posisi
yang benar jumlah yang lebih tinggi adalah yang lebih diharapkan (lebih baik)
• Untuk jumlah ubin yang menempati posisi
yang salah jumlah yang lebih kecil adalah yang diharapkan (lebih baik).
• Menghitung total gerakan yang diperlukan
untuk mencapai tujuan jumlah yang lebih kecil adalah yang diharapkan (lebih
baik).
2. Pencarian terbimbing
(heuristic search)
• Ada 4 metode pencarian heuristik
– Pembangkit & Pengujian (Generate and Test)
– Pendakian Bukit (Hill Climbing)
– Pencarian Terbaik Pertama (Best First Search)
– Simulated Annealing
a.Pembangkit & Pengujian (Generate and
Test)
• Pada prinsipnya metode ini merupakan
penggabungan antara depth-first search dengan pelacakan mundur (backtracking),
yaitu bergerak ke belakang menuju pada suatu keadaan awal.
Algoritma:
– Bangkitkan suatu kemungkinan solusi
(membangkitkan suatu titik tertentu atau lintasan tertentu dari keadaan awal).
– Uji untuk melihat apakah node tersebut
benar-benar merupakan solusinya dengan cara membandingkan node tersebut atau
node akhir dari suatu lintasan yang dipilih dengan kumpulan tujuan yang
diharapkan.
– Jika solusi ditemukan, keluar. Jika tidak,
ulangi kembali langkah yang pertama.
Contoh : Traveling Salesman Problem (TSP)
Seorang salesman ingin
mengunjungi n kota. Jarak antara tiap-tiap kota sudah diketahui. Ingin
diketahui rute terpendek dimana setiap kota hanya boleh dikunjungi tepat 1
kali.
Contoh : Traveling Salesman Problem (TSP)
• Generate & test akan membangkitkan
semua solusi yang mungkin:
– A – B – C – D
– A – B – D – C
– A – C – B – D
– A – C – D – B, dll
Kelemahan dari Pembangkit & Pengujian
(Generate and Test) yaitu ;
– Perlu membangkitkan semua kemungkinan sebelum dilakukan pengujian
– Membutuhkan waktu yang cukup lama dalam pencariannya
b. Pendakian Bukit (Hill Climbing)
b. Pendakian Bukit (Hill Climbing)
• Metode ini hampir sama dengan metode
pembangkitan & pengujian, hanya saja proses pengujian dilakukan dengan
menggunakan fungsi heuristik.
• Pembangkitan keadaan berikutnya sangat
tergantung pada feedback dari prosedur pengetesan.
• Tes yang berupa fungsi heuristic ini akan
menunjukkan seberapa baiknya nilai terkaan yang diambil terhadap
keadaan-keadaan lainnya yang mungkin.
c. Simple Hill Climbing
Algoritma
– Mulai dari keadaan awal, lakukan
pengujian: jika merupakan tujuan, maka berhenti; dan jika tidak, lanjutkan
dengan keadaan sekarang sebagai keadaan awal.
– Kerjakan langkah-langkah berikut sampai
solusinya ditemukan, atau sampai tidak ada operator baru yang akan
diaplikasikan pada keadaan sekarang:
• Cari operator yang belum pernah digunakan; gunakan operator ini untuk
mendapatkan keadaan yang baru.
• Evaluasi keadaan baru tersebut.
• Jika keadaan baru merupakan tujuan, keluar.
• Jika bukan tujuan, namun nilainya lebih baik daripada keadaan sekarang,
maka jadikan keadaan baru tersebut menjadi keadaan sekarang.
• Jika keadaan baru tidak lebih baik daripada keadaan sekarang, maka
lanjutkan iterasi.
Contoh TSP
• Operator : Tukar kota ke-i dengan kota
ke-j (Tk i,j)
• Untuk 4 kota:
– Tk 1,2 : tukar kota ke-1 dengan kota ke-2.
– Tk 1,3 : tukar kota ke-1 dengan kota ke-3.
– Tk 1,4 : tukar kota ke-1 dengan kota ke-4.
– Tk 2,3 : tukar kota ke-2 dengan kota ke-3.
– Tk 2,4 : tukar kota ke-2 dengan kota ke-4.
– Tk 3,4 : tukar kota ke-3 dengan kota ke-4.
• Untuk N kota, akan ada operator
sebanyak:
d. Steepest Ascent Hill Climbing
• Steepest-ascent hill climbing sebenarnya
hampir sama dengan simple hill climbing, hanya saja gerakan pencarian tidak
dimulai dari posisi paling kiri.
• Gerakan selanjutnya dicari berdasarkan
nilai heuristik terbaik.
• Dalam hal ini urutan penggunaan operator
tidak menentukan penemuan solusi.
• Steepest-ascent hill climbing sebenarnya
hampir sama dengan simple hill climbing, hanya saja gerakan pencarian tidak
dimulai dari posisi paling kiri.
• Gerakan selanjutnya dicari berdasarkan
nilai heuristik terbaik.
• Dalam hal ini urutan penggunaan operator
tidak menentukan penemuan solusi.
Algoritma
• Mulai dari keadaan awal, lakukan
pengujian: jika merupakan tujuan, maka berhenti; dan jika tidak, lanjutkan
dengan keadaan sekarang sebagai keadaan awal.
• Kerjakan hingga tujuan tercapai atau
hingga iterasi tidak memberikan perubahan pada keadaan sekarang.
• Tentukan SUCC sebagai nilai heuristic
terbaik dari successorsuccessor.
• Kerjakan untuk tiap operator yang
digunakan oleh keadaan sekarang:
• Gunakan operator tersebut dan bentuk
keadaan baru.
• Evaluasi keadaan baru tersebut. Jika
merupakan tujuan, keluar. Jika bukan, bandingkan nilai heuristiknya dengan SUCC.
Jika lebih baik, jadikan nilai heuristic keadaan baru tersebut sebagai SUCC.
Namun jika tidak lebih baik, nilai SUCC tidak berubah.
• Jika SUCC lebih baik daripada nilai
heuristic keadaan sekarang, ubah node SUCC menjadi keadaan sekarang.
Sumber :
D. BIDANG KAJIAN DALAM SISTEM CERDAS
1) SISTEM CERDAS BERBASIS PENGETAHUAN
Sistem cerdas berbasis pengetahuan adalah sistem yang memiliki kemampuan menyerap kepakaran seorang ahli. Sistem ini ditunjukkan pada Gambar 2.1 memiliki sebuah blok utama berupa basis pengetahuan yang berisi informasi kepakaran. Informasi kepakaran dijabarkan algoritma cerdas, dan komponen prakondisi isyarat yang mengatur kerja sensor-sensor. Algoritma cerdas inilah yang memutuskan aksi-aksi yang tepat untuk setiap keadaan/status sistem.
1) SISTEM CERDAS BERBASIS PENGETAHUAN
Sistem cerdas berbasis pengetahuan adalah sistem yang memiliki kemampuan menyerap kepakaran seorang ahli. Sistem ini ditunjukkan pada Gambar 2.1 memiliki sebuah blok utama berupa basis pengetahuan yang berisi informasi kepakaran. Informasi kepakaran dijabarkan algoritma cerdas, dan komponen prakondisi isyarat yang mengatur kerja sensor-sensor. Algoritma cerdas inilah yang memutuskan aksi-aksi yang tepat untuk setiap keadaan/status sistem.

Contoh kepakaran yang bisa disimpan oleh sistem ini antara lain adalah kepakaran untuk menghindari rintangan-rintangan, kepakaran untuk menginjeksi pupuk dengan takaran yang tepat [2], memisahkan obyek-obyek sesuai dengan klasifikasi tertentu [3], atau kepakaran untuk mengenal dengan baik kondisi obyek hasil pertanian yang hendak dipanen [4]. Kepakaran ini tentunya harus didukung oleh sensor dengan presisi yang memadai.
2) SISTEM LOGIKA SAMAR (FUZZY LOGIC SYSTEM)
Sistem logika samar adalah sistem yang mengadopsi strategi kendali dengan logika inferensi samar. Logika inferensi (penyimpulan) samar ini mengolah data-data eksternal dengan menggunakan fungsi-fungsi keangotaaan yang bersifat samar. Gambar 2.2 menunjukkan struktur dasar sebuah sistem cerdas berbasis logika samar.
Sistem logika samar secara luas telah digunakan dalam aplikasi mekatronika dalam bidang pertanian seperti untuk mendeteksi kadar nitrogen hasil bumi menggunakan sensor multi-spectral [7]. Selain itu sistem ini secara efektif juga bisa digunakan untuk mengendalikan robot bergerak [8].
Gambar
2.3 menunjukkan arsitektur dari sistem logika samar (SLS). Sistem SLS terdiri
dari beberapa komponen di antaranya blok Membership Function (NB, NS, Z, PS,
PB), blok fungsi minimum (Min1, s.d. Min 25), blok fungsi maksimum (MAX), blok
pengali (Mult), penjumlah (ADDER), dan pembagi (DIV). Blok-blok tersebut secara
fungsional bekerja dengan cara mengeksekusi aturan-aturan inferensi yang telah
ditetapkan hingga menghasilkan keluaran keputusan kendali.

3) SISTEM BERBASIS JARINGAN SYARAF TIRUAN
(ARTIFICIAL NEURAL NETWORK)


Gambar 2.4(b) menunjukkan arsitektur dalam menerapkan JST dalam sistem kontrol. Sistem JST telah sukses diimplementasikan ke dalam mikroprosesor untuk aplikasi teknologi pertanian dengan pemupukan presisi tinggi [5]. JST juga telah sebagai sistem penghematan pengguanaan energi pada stasium pompa hidrolik [6].
JST terdiri dari sejumlah besar sel syaraf (neuron) dengan interkoneksi yang sinaptik yang sangat besar pula. Gambar 2.5 menunjukkan model JST yang terdiri dari 3 lapisan, 32 sel syaraf yang dikelompokkan dalam 9 buah grup, dan sejumlah interkoneksi sinaptik antar neuron pada lapisan yang berbeda.
Neuron dan sambungan sinaptik akan menyimpan informasi penting tentang kepakaran yang diperoleh setelah JST dilatih dengan berbagai data-data pasangan input-output yang diinginkan. Salah satu algoritma yang cukup terkenal untuk melatih JST adalah algoritma “Backpropagation”. Algoritma ini akan mengubah nilai-nilai bobot sinaptik sehingga JST akan membentuk fungsi-fungsi khusus sesuai yang diajarkan. Jadi melalui neuron dan bobot-bobot sambungan sinaptik, JST berfungsi untuk menyimpan informasi kepakaran yang sewaktu-waktu diperlukan untuk mengelola data-data isyarat yang telah pernah diajarkan sebelumnya.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Sumber :
E. PENYAJIAN KNOWLEDGE DALAM SISTEM CERDAS PADA MASING-MASING
a. Bidang Pendidikan : Robot Education
b. Bidang kedokteran : sistem pakar,jaringan syafar tiruan,logika fuzzy dan algoritma genetic
c. Bidang Keamanan Dan Pertahanan (militer) : penerapan virtual reality untuk latihan perang dan sebagainya
d. Bidang ekonomi & bisnis : sistem prediksi kurs mata uang
e. Bidang pertanian : menganalilis kualitas tanaman
f. Bidang teknik dan rekayasa : kecerdasan dalam robot
a. Bidang Pendidikan : Robot Education
b. Bidang kedokteran : sistem pakar,jaringan syafar tiruan,logika fuzzy dan algoritma genetic
c. Bidang Keamanan Dan Pertahanan (militer) : penerapan virtual reality untuk latihan perang dan sebagainya
d. Bidang ekonomi & bisnis : sistem prediksi kurs mata uang
e. Bidang pertanian : menganalilis kualitas tanaman
f. Bidang teknik dan rekayasa : kecerdasan dalam robot
Sumber: